
As mentioned last August, I've decided to do a serious attempt at a redesign of my Hailfire Droid in order to get those proportions right. After about 150 hours spread across the past half year and plenty of (expensive) Bricklink orders, I've come to a point in development where I'm ready to write something about it.
Literally, the last blogpost regarding my Hailfire Droid has been over three years ago.
So, where to start? I think it's best to go chronologically through the process in how I got from the previous iteration to what is currently on my desk. And that starts with the wheel size.
As discussed in the previous blogpost, one of the things that started to bug me about my previous design were the proportions. Ever since I started this project back in 2013, I wanted to use the prefab wheels that came with the original Technic model to determine the scale for my design. Basically, I aimed to get my Hailfire Droid to be at the same scale as the original model, but then include it with the necessary components to make it remote controlled.
While there's nothing wrong with the idea behind it, I did come to learn that parts such as a battery box, IR receivers and motors take up a lot of space. And the amount of space that is required with a Power Functions layout seemed to be quite demanding for what I wanted to achieve with it. The overall proportions of a Hailfire Droid is not really that favorable for the specific scale that I want to work with - there aren't a lot of places to include large components.
The required space caused the skeleton of the old Hailfire Droid to become out of proportion, almost giving it a "chibi" feel because the head ended up that big with all the required components stuffed inside it. While there's nothing wrong with a "chibi Hailfire Droid", it was not really the design I was aiming for in the first place...
Thus, I hit a bit of a dead end.
Although in those 7 years that I've been working on my Hailfire Droid, time has brought me new opportunities for the project. LEGO® has made plenty of new parts and recolors for old ones. Thus, I ended up with several options at hand with what I could do:
- Stick with the "chibi Hailfire Droid" and live with the flaws it has. Finish the design as it is, and then move on with life. I suppose that in a way, the design has a certain charm to it.
- Reduce the amount of electronic components required in order to make the overall model smaller. Replace Power Functions with the new Powered Up System to get rid of the IR receivers. This would also mean that I'll end up with less play features with the model.
- Stick with the Power Functions layout as it is, but make the Hailfire Droid larger.
At first, option 2 seemed to be the most ideal choice to make. I would allow myself to stick with the prefab wheels and keep the Hailfire Droid small and compact. However, as I further explored option 2, I suddenly realized that pursuing that path would come at a significant compromise: it would require me to reduce the amount of play features.
I could make a Hailfire Droid with Powered Up, but due to plug limitations of the default battery box, the Hailfire Droid would only be able to drive. It would no longer have the rotating laser gun of my previous model, and it wouldn't even allow for its eyes to light up. Powered Up also has no backwards compatibility with 9V/Power Functions, so everything must be done with Powered Up components. Any Powered Up battery box with more available plugs would take up too much space.
Even if I would go for this route, using Powered Up for only turning the wheels is not the best use of that system either. If my only functions are to turn two wheels, I would only need two rotating axis. That also means that something like Spybotics, Micro Scout or the Manas unit would suffice too, and possibly even take up less space than a fully dedicated Powered Up layout (i.e. no wires involved). So from a practical perspective, I felt more inclined to explore option 3 and see what benefits that one could offer.
With option 3, the Hailfire Droid would become larger... which is something I wasn't keen on at first. With my MK projects, I have a desired size to work with. To be more specific: if it fits inside any "IKEA Kallax" box, I'm good. It is just the right size - model doesn't become too big or too heavy. So while the Hailfire Droid would become larger,
I would still design it to fit inside a Kallax box. Designing a large(r) wheel diameter that would fit within a Kallax was fortunately a matter of minutes.
That's where I've discovered one of the better opportunities by going with option 3: the method of driving. One of the things that concerned me the most of my original approach has to do with the prefab wheels. It cannot be denied that my previous Hailfire Droid was very wobbly.
{kind=link}
Heck, in the past 7 years, plenty of other Hailfire Droid MOCs in the AFOL community have surfaced. That I was (one of) the first doesn't mean that it stays like that. Just do a quick Google search for Hailfire Droid projects and you're going to see plenty of other (recent) examples. Most of these are just static display models - but if you find any remote controlled ones, you can see that they come with the same issues as I've had: wobbly driving. Even if you would look at any official Hailfire Droid RC toys that has a video review on Youtube: wobbly driving.
But the "real" thing however, does not drive wobbly. It drives around pretty damn steady. And that is what I want with my Hailfire Droid model. No more wobbles. It was time to ban wobbling. It was time to design a Hailfire Droid that is good enough. Something that is actually good enough to be worthy of becoming a LEGO® Product Designer.
Figuring out why all of these Hailfire Droids are wobbly wasn't a difficult answer to find. It's basic physics. The Hailfire Droid has two large wheels and with LEGO® motors there's no such thing as acceleration - it goes from 0 to max the moment you pull the trigger on any controller. Have a design with an excessively high center of gravity and the moment you stop the thing, all of that moving mass can't go anywhere but in the direction you were driving. Basically, it's like sitting in a car without seatbelts when someone pulls the brakes.
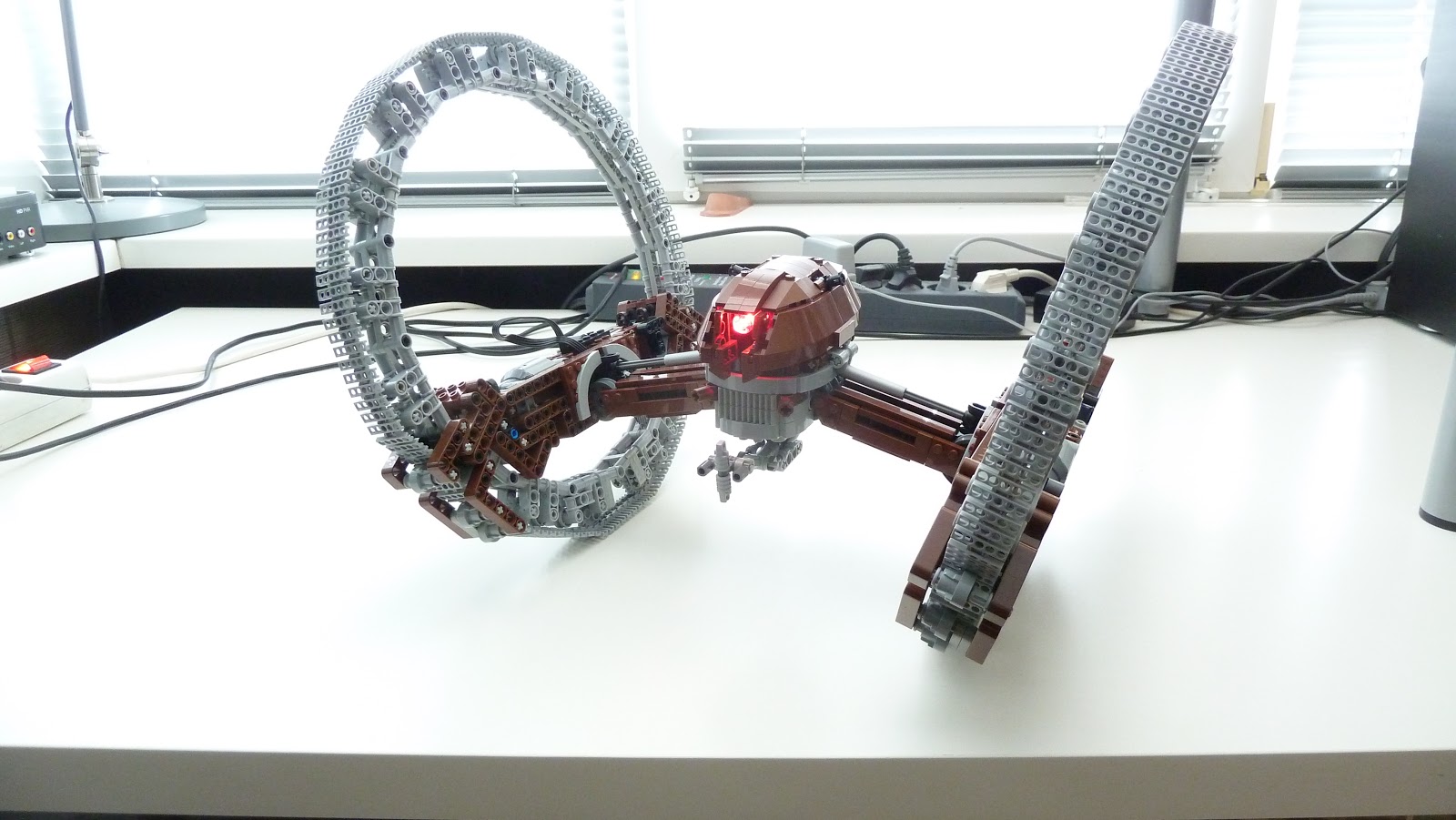
Finding a solution to prevent wobbling wasn't difficult either. It was simple: just don't use two large wheels. You can have a Hailfire Droid with two wheels, but the moment you motorize these wheels is when physics gets involved. So... my Hailfire Droid will have two wheels, but I don't motorize these wheels. Instead, I've decided to drive around with tank treads - it would give the illusion of a Hailfire Droid having two large wheels, but in reality it's just a pair of caterpillar tracks that revolves around a donut-shaped frame.
Is it cheating? Probably. At least it should get rid of wobbling.
So, with that in mind... it was time to give this concept a shot. I've made my first LDD sketches in July. When I felt content with my decision, I announced it on my blog last August. Two small Bricklink orders later, I had my first look close to midnight to see what a difference it would make...

I definitely felt excited about comparing the old model with my new proof of concept. At that point I've noticed something I hadn't until I had the two next to each other: the new one demands a lot more presence.
 |
| One of the earlier wheel designs. Can you guess how many tank treads I had to buy? |
It was time to get the wheels to work - this took a great number of weeks and Bricklink orders. There were even a small number of gears that shattered... as the tension between the treads and the motor was too much for the gears.
The "belt" of tank treads should not be too tight, nor loose. If it's too tight, it would stress the motor and gears, or the treads would break. If it's too loose, it would no longer have a nice shape as the treads would sag.
So, when I got the wheels ready after lots of tweaking, it was time to work on the main body.

From that point, I had a couple of major steps forward every month. Lots and lots of trial and error, lots of trying out things. It's one of those "you could make a training montage out of it". I can ensure you, there's been a lot of damn roadblocks while going through every step. Getting the right shape for the head took a large number of attempts. Wires have been a nightmare, I tell you.
Funnily enough, at first I had to completely get rid of the Micromotor used for the rotating laser gun in early steps of the design process. The laser gun would've been a static thing that you would have to rotate manually... But when I was optimizing the usage of space in the Hailfire Droid's head, I found enough room to fit a Micromotor right underneath the battery box.
And well, before you know it, I got to the blogpost that is today. But as the title of this post would imply, it's still a work in progress. Heck, could say that the model isn't even halfway done yet - but at least it's presentable enough to write about it.
There's still a bunch of work left, and I'm still planning to finish it this year. Not sure if I'd actually do another one of these until I'm done, since this blogpost kinda explains all the basics about the current design approach. We'll see.
That said, the proportions are still not completely right... but I suppose that's somewhat nitpicking at this point. I could take a Powered Up layout to (further) save up some space in order to get closer to those right proportions, but if I were to do that, my model would lose its soul. You see, having a Hailfire Droid model like this that can drive around is good, maybe it can be considered great. But if it can do more than just that, that's when it starts to become something special. That "icing on the cake".
When comparing this model to my old design, I feel like I didn't go cheap and went the extra mile to get some oomph with this thing. But more importantly, I feel more confident behind this model (and project) than I did years ago. Having a rejuvenated interest and motivation (this late in the design process) is a healthy and positive thing.

At least the model is that damn sturdy, that it no longer wobbles when driving around. Heck, it can now even drive upside down if I feel like it. Now that's some good design.
That's it for today - I'll see you guys again next post!
No comments:
Post a Comment